Prestudy case study
Screening underwater UXO with AUV magnetometry.
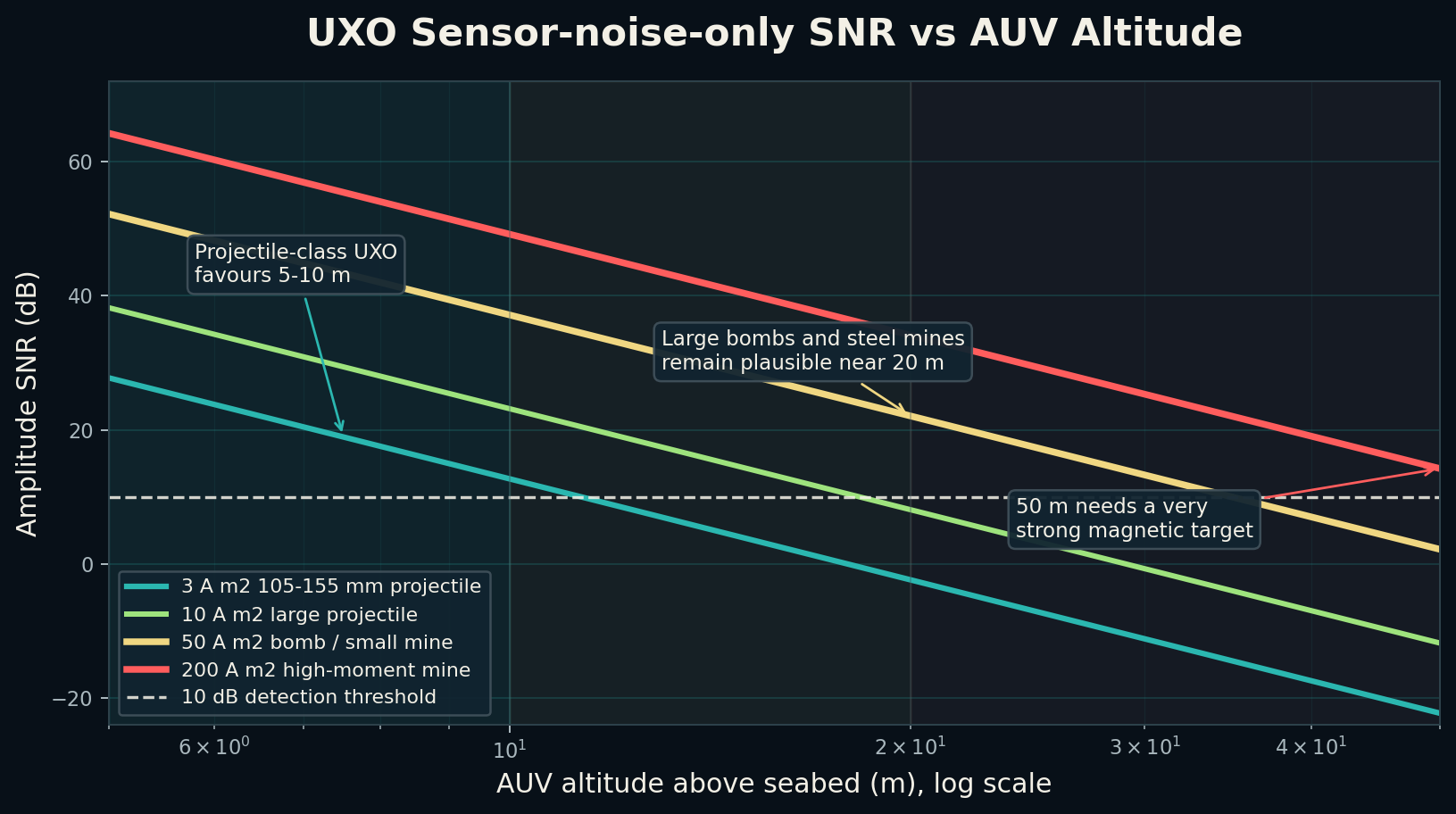
A low-noise three-axis fluxgate can support AUV detection of ferrous UXO and mine-like objects, but altitude is decisive. Projectile-class targets favour 5-10 m survey height; large bombs and steel-cased mines can be plausible at 10-20 m; 50 m is mainly a coarse screen for strong magnetic targets.
Scenario
The useful question is magnetic moment versus range.
The prestudy assumes an AUV-mounted magnetometer surveying 5-50 m above the seabed at 3 kts, with a sensor noise floor of 0.5 nT/√Hz. Where burial data are unavailable, the target is assumed to sit on the seabed. Burial sensitivity is checked at 0.5, 1.5 and 3 m below seabed.[1]
UXO magnetometry literature commonly models compact ferrous ordnance as a magnetic dipole in the far field. Public measured moment data are strongest for 20-155 mm ordnance; larger WWII bombs and naval mines are therefore bracketed as moment classes rather than treated as exact values.[2][3]
Field levels
Altitude turns promising targets into marginal ones.
The screening model uses the axial dipole envelope, where magnetic field scales as 200 m/r³ nT for moment m in A m² and range r in metres. A typical orientation may be closer to half that value, and scalar total-field response can be lower depending on target orientation and geomagnetic field direction.
For an object on the seabed, a 3 A m² projectile-class target is about 4.8 nT at 5 m and 0.6 nT at 10 m, but only 0.075 nT at 20 m. A 50 A m² large bomb or small mine-like case is about 80 nT at 5 m, 10 nT at 10 m and 1.25 nT at 20 m. A 200 A m² high-moment mine-like target reaches about 5 nT at 20 m and 0.32 nT at 50 m.
Detectability
At 3 kts, the sensor is capable; the platform decides the limit.
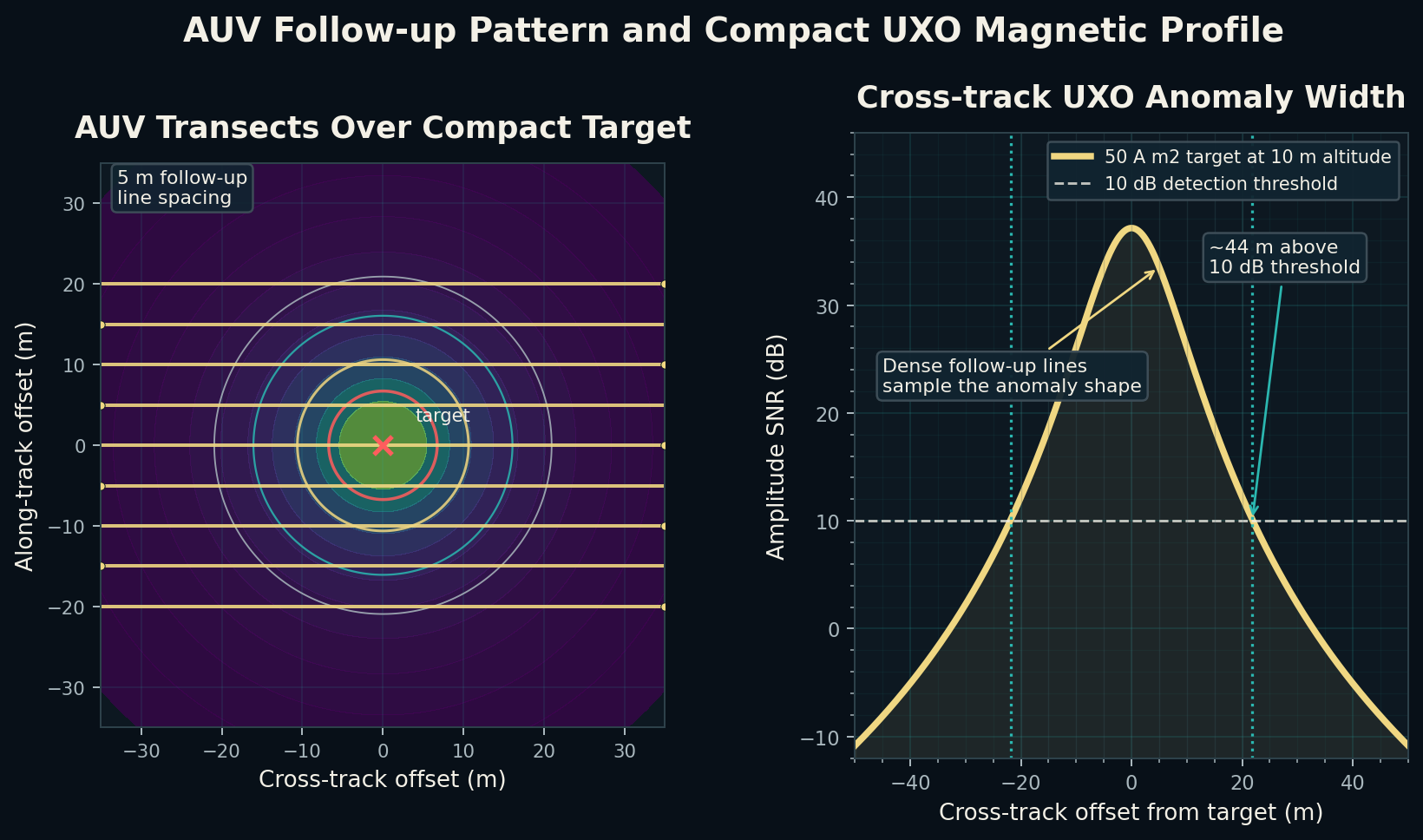
At 3 kts the AUV travels about 1.5 m/s. A simple dwell estimate of two altitudes of useful anomaly width gives about 6.5 s at 5 m, 13 s at 10 m, 26 s at 20 m and 65 s at 50 m. Sensor-noise-only integration lowers the effective noise to about 0.20, 0.14, 0.10 and 0.06 nT across those heights.
Using a 10 dB amplitude-SNR threshold, where SNR is 20 log10(signal/noise), the moment needed for detection is about 0.4 A m² at 5 m, 2.2 A m² at 10 m, 12 A m² at 20 m and 123 A m² at 50 m. Those are optimistic instrument limits; AUV magnetic self-noise, heading effects, altitude error, geologic background and ferrous clutter will usually set the practical threshold.
Oehler et al. provide a useful processing comparison: their NemoSens AUV trial used about 3 kts speed, about 3 m altitude, 10 Hz magnetic data and roughly 5 m line spacing. Their figure-of-merit calibration reduced AUV heading effects by about 96%, then used 0.3-0.5 Hz low-pass filtering and per-profile median removal. The result was detection of several-tens-of-nT anomalies from purposely dropped steel UXO simulants, and the paper argues that sub-10 nT anomalies can be highlighted after suitable calibration.[4]
Burial and mine context
Most WWII UXO are shallow, but recent mines keep the use case alive.
North Sea EOD experience cited in the UXO inversion literature indicates that most typical WWII UXO are on the seabed or partly buried, with few at 1.5 m or deeper. Sandy seabeds can still expose, mobilize or self-bury objects, so burial remains a survey uncertainty rather than a fixed input.[5][6]
Modern mine threats are operationally relevant for the same physics. Persian Gulf incidents include moored contact and bottom-laid influence mines, while Black Sea shipping has faced drifting mine hazards since the Ukraine war. Steel-cased mines can fall into the large-target bracket, but reduced-signature or nonmagnetic designs make sonar and visual confirmation essential.[7][8][9]
Technology fit
TrueMag is strongest as a low-altitude ferrous-anomaly sensor.
The defensible claim is not universal UXO clearance from high altitude. It is compact, synchronized, low-noise magnetic sensing for AUV surveys where ferrous anomaly detection, repeat transects and gradient-capable installations can improve target screening.
For projectile-class targets, plan around 5-10 m altitude. For large bombs and mine-like steel cases, 10-20 m can be credible. Treat 50 m as reconnaissance for only the strongest magnetic targets.
Discuss AUV integrationReferences
Source basis.
- NOAA Ocean Exploration: Magnetometer. Used for general marine magnetometer context, including AUV-mounted and buried-ferrous-object use.
- Wigh, Hansen and Dossing: Probabilistic inversion of magnetic UXO data. Used for the compact-dipole modelling basis, inversion limitations, and a 155 mm projectile field example.
- Billings and Youmans: Magnetic models of unexploded ordnance. Used for measured induced and remanent magnetic-moment context for 20-155 mm ordnance.
- Oehler et al.: Processing of unmanned underwater vehicle vector magnetometer data. Used for AUV-integrated vector fluxgate processing, FoM calibration, 3 kts / 3 m / 10 Hz survey numbers, 0.3-0.5 Hz filtering and detection of weak steel-target anomalies.
- Royal Danish Navy EOD experience cited by Wigh et al.. Used for the statement that most typical WWII North Sea UXO are on or partly in the seabed, with few at 1.5 m or deeper.
- Baeye et al.: Mobilization of unexploded ordnance on the seabed. Used for seabed mobility, exposure and self-burial context.
- USNI Proceedings: U.S. Navy, December 1991. Used for Persian Gulf mine incident context involving USS Princeton and USS Tripoli during Operation Desert Storm.
- AP News: Turkey, Bulgaria and Romania Black Sea mine agreement. Used for recent Black Sea drifting-mine risk context.
- Joint Publication 3-15: Barriers, Obstacles, and Mine Warfare for Joint Operations. Used for general bottom, moored and influence-mine category context.